The mechanism for determining location in indoor environment is a foundation for the majority of scientific and industrial applications of mobile robots. After decades of intensive research in the domain the problem itself does not pose a significant theoretical or algorithmic challenge. However it seems that there are hardly any products offered, which would be accurate, robust and affordable. The developped solution could become a basis for many robotics application and for further improvements of the marker-based localization methods.
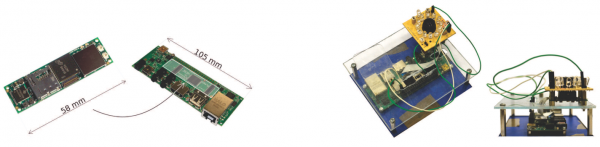
The designed localization device is composed of popular, available hardware, which is simple to integrate. The computer and the camera are designed to work with each other. The infra-red illuminating component required only superficial electronics knowledge to build. The device is relatively small and does not have excessive energy requirements.
The developed image recognition software, which proved to work properly in different conditions, is distributed as an open-source. The source code and required materials can be found here: https://bitbucket.org/adebski/overo-projekt
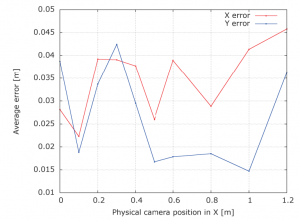
The integrated system has many desired features. It offers good accuracy and high performance, providing more than 30 measurements per second with average positioning error of less than 5cm. It provides mechanisms for dynamic adaptation for changing light conditions.
The localization results are comparable to parameters of the best off-the-shelf products available on the market. However the created device is significantly less expensive and, what is most important, it is fully extensible, making it possible to modify the software and extend hardware according to particular needs.
The further work on the device will focus on improving the robustness by introducing algorithm for efficient control of emitted light intensity. Another planned extension will improve the localization precision by embedding signal filtering algorithm into the device. Defining proper model of the robot motion and providing the information concerning robot control should significantly improve the overall accuracy.